Windows用バイナリ版インストール#
- 著者:
稲村 泰弘
- 最終更新日:
Dec. 1st, 2022
- 対応空蟬リリース:
4.0 or later
概要#
本章では空蟬をWindows環境にバイナリパッケージでインストールする方法を示す。
なお、2022年11月現在で、対応しているMLFにおけるビームラインは以下の通りである。
BL(code) |
注意点 |
状況 |
|---|---|---|
BL01(SIK) |
特になし |
対応済み |
BL14(AMR) |
特になし |
対応済み |
BL15(SAS) |
Dviewは含まず |
対応済み |
動作環境#
本章で動作を保証するWindowsは以下の通りである。
Available Windows version# Windows
Architecture
11
x86_64 (amd64)
10
これら以外の環境(32bit版も含め)は今後もサポートする予定はない。
事前の確認事項#
アカウント名に関して注意すべき点がある。インストールするWindowsの管理者ユーザーのアカウント名が 英数字 でなければならない。 既に日本語を利用していた場合、新たに英数字のアカウント名でユーザーを作成し、そちらでログインしてからインストールする必要がある。新たにアカウントを作成する方法などは省略する。
Account Name Examples# アカウント名の条件
良い例
悪い例
英数字であること
Inamura
稲村
手順の概要#
Windows版におけるインストール手順は以下のような流れとなる。
インストール
Pythonのインストール
空蟬のインストール
初期設定
インストール#
空蟬のインストールを行う前に、Windowsの Python をインストールする必要がある。これは下記のテーブルにある場所にあるインストーラなどから行えるが、インストールするPythonのバージョンに注意すること。また64bit版しか動作しないことに注意。
WindowsにインストールできるPython環境は様々に存在するが、現状、空蟬が動作することを確認できたものは以下の2種類であるので注意すること。
Confirmed Python Environments on Windows# Pythonインストール
URL
対応バージョン
Anaconda3
2022.10 ~ 2019.03 (Python3.7 ~ 3.9)
python.org(本家)
3.7のみ対応
Pythonと空蟬のインストール作業は、最初にインストールするPythonの種類(Anaconda3版とPython.org版)で手順が若干異なる。それぞれの環境に応じたインストールを下記に示す。
インストールされるアプリケーション#
空蟬ソフトウェア群は、インストール時に指定した場所(C:¥¥Program Files¥Utsusemi¥)にある。 また、アプリケーションへのショートカットが、以下の場所に作成される。
「スタート」メニュー >> Utsusemi
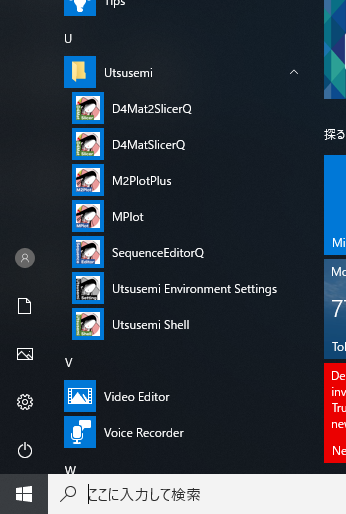
ここには以下のプログラムが準備されている。詳細は後で述べる。
List of Utsusemi Applications installed# Utsusemiアプリケーション
説明
D4MatSlicer
D4MatSlicerを起動する
D4Mat2Slicer
D4Mat2Slicerを起動する
M2PlotPlus
M2Plotを起動する
MPlot
MPlotを起動する
SequenceEditorQ
SequenceEditorを起動する
Utsusemi Environment Settings
【環境設定】空蟬のフォルダ環境変数を設定する
Utsusemi Shell
Utsusemi環境が設定されたターミナルを起動する
初期設定#
空蟬における初期設定は、
必要なフォルダの作成(データフォルダ、データ処理用フォルダ)
環境変数の設定
である。
必要なフォルダの作成#
空蟬Windows版では、まず解析用データの置き場所と一時ファイル保存場所をフォルダとして準備する必要がある。
設定(環境変数名) |
役割 |
|---|---|
データフォルダ (DATA_DIR) |
イベントデータなどRAWデータを格納するフォルダ。(Linux版では”/data”) |
解析用フォルダ (USR_DIR) |
空蟬が作成する一時ファイルを保存するana/tmpなどのフォルダを置く場所である。(Linux版では”$HOME”) |
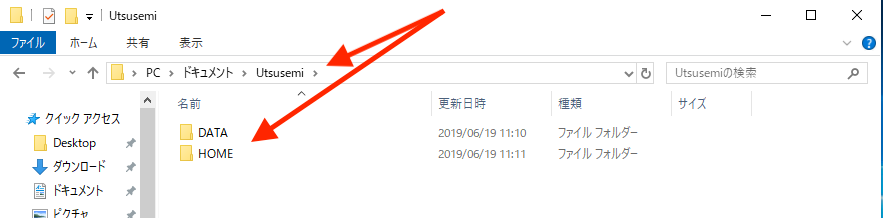
この二つのフォルダはどこにあっても良いが、例えば下記に示すような場所に作成する。
Example of path to folders required by Utsusemi# 設定
デフォルトフォルダ
データフォルダ
C:¥ユーザー¥ユーザー名¥ドキュメント¥Utsusemi¥DATA
解析用フォルダ
C:¥ユーザー¥ユーザー名¥ドキュメント¥Utsusemi¥HOME
環境設定#
次に空蟬の環境の設定を Utsusemi Environment Settings で行う。
なお、この作業はインストール後に一度は必ず行う必要がある。
このアプリケーションで設定できる内容は以下の通りである。
使用する装置環境(BL01, BL11, BL14, BL15)
データフォルダと解析フォルダの設定
ログを残すかどうか
高速化のための並列計算の数
デバッグモードのオン・オフ
よって、違う装置(ビームライン, BL)のデータを解析する場合は、この環境設定で装置環境を切り替える必要がある。
環境設定の起動#
「スタート」メニュー >> Utsusemi から、 Utsusemi Environment Settings を起動する。
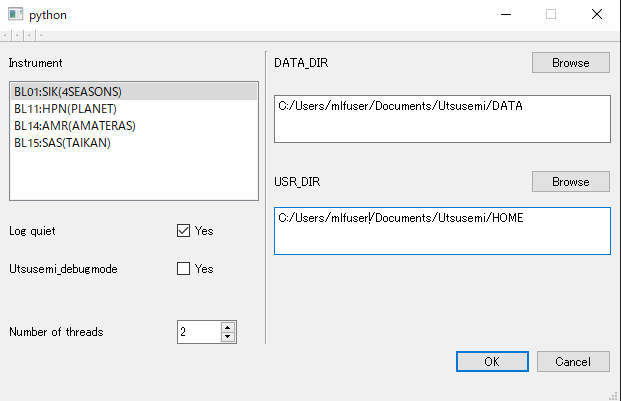
設定項目#
Utsusemi Environment Settings で設定できるものは以下のものである。
設定(環境変数) |
役割 |
|---|---|
Instrument |
解析に使用するデータの装置の選択を行う。 これにより、使用するRAWデータフォルダ、使用できるコマンドなどが変化する。 |
Log quiet |
解析コマンドのログを減らす場合に使用する。普段はYESで良い。 なおmacOSでの空蟬の実行ログは通常あらわには表示されない。すべてのログは /tmp/mlfsoft.log に書き込まれる。 |
Font Size |
GUIアプリのフォントサイズを定義する。通常は12で良いだろう。大きくしたり小さくしたりはできるが、 GUIパーツ(ボタンなど)やレイアウトが崩れる可能性があるので注意。 |
Debug mode |
空蟬のデバッグモード。普段はNO(チェックボックスオフ)で良い。 |
Number of threads |
一部の解析コマンドが使用するマルチスレッドの最大値を設定する(通常は実行するPCのコアの数程度を設定すると良い) |
DATA_DIR |
イベントデータなどRAWデータを格納するフォルダ。(Linux版では”/data”) |
USR_DIR |
空蟬が作成する一時ファイルを保存するana/tmpなどのフォルダを置く場所である。(Linux版では”$HOME”) |
設定後#
設定項目を反映するために OK ボタンを押す。正しく設定されれば、確認のダイアログが表示される。
このダイアログが出ずにエラーのダイアログが出た場合は、特に指定した DATA_DIR と USR_DIR のフォルダがあるかどうかを確認すること。この設定により、 USER_DIR の下に
ana フォルダ
その下に tmp フォルダ、および xml フォルダ
がなければ自動的に作成される。
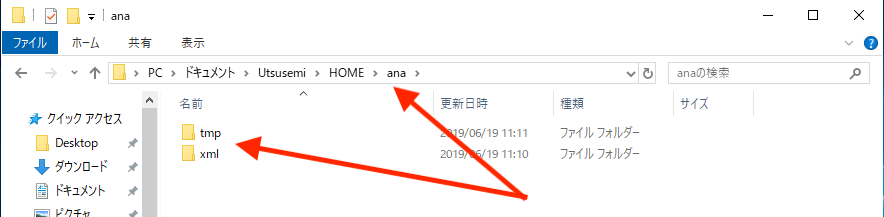
- 注意点
ana フォルダ、 tmp や xml フォルダが見つからないようなら設定を見直すか、自分で作成しておくこと。 これらのフォルダがない場合 空蟬は正しく動作しない可能性がある 。
一方 DATA_DIR で設定した場所には、次節にて述べるルールでデータ(イベントデータなど)を配置する。
データの配置ルール#
環境変数 DATA_DIR で指定したフォルダに、以下のようなルールで配置する。
装置コードと同じ名前のフォルダを作成する
四季(BL01)なら “SIK”、アマテラス(BL14)なら “AMR”
装置コードのフォルダに、その装置でのRun Noのついたデータのフォルダを置く
四季(BL01)なら、例えば “SIK012345_20150301” など
BL |
装置コード |
配置例 |
|---|---|---|
BL01 四季 |
SIK |
DATA/SIK/SIK012345_20160401 |
BL11 PLANET |
HPN |
DATA/HPN/HPN012345_20160401 |
BL14 アマテラス |
AMR |
DATA/AMR/AMR012345_20160401 |
BL15 大観 |
SAS |
DATA/SAS/SAS012345_20160401 |
BL19 匠 |
ENG |
DATA/ENG/ENG012345_20160401 |
空蟬の実行#
環境設定が終了し解析するデータの配置も終わっていれば、アプリケーションから解析が行えるようになる。
空蟬のインストールにより、以下のアプリケーションが「スタート」メニューから使用できる。簡単な説明を行う。
- Utsusemi Environment Settings
【環境設定】空蟬の環境変数を設定する。詳細は前述の「環境設定」以下を参照のこと。
- MPlot, M2PlotPlus
空蟬で使用されるデータ可視化ソフトウェアである。それぞれ、1次元プロッタ、2次元プロッタである。詳細は空蟬ユーザーマニュアルを参照のこと。Linux版と同じ。
- D4MatSlicer, D4Mat2Slicer
D4MatSlicer、およびD4Mat2Slicerを起動する。あとはLinux版と同じ。
- SequenceEditorQ
SequenceEditorを起動する。
- Utsusemi Shell
空蟬環境で、Shell(コマンドライン)を起動する。この上で環境設定にて指定したビームラインに応じたコマンドを呼び出すことができる。よって、自作のスクリプトを走らせることもできる。
解析に使用するアプリケーションの詳細な説明は、空蟬ユーザーズマニュアルを参照のこと。
コマンドプロンプトからの使用#
アプリケーションを利用せずに、例えば自分で作成したPythonスクリプトを実行することも可能である。特に現場で作成したスクリプトや新しい解析のアイデアを形にしたコードなどを自由に実行するためには、コマンドプロンプト上で空蟬環境を利用する必要がある。その方法を以下に示す。
Utsusemi Shell を起動する
空蟬の設定が有効な状態でコマンドプロンプトが立ち上がるので、そのままPythonを起動するなり、他のインタプリタ(例えば iPython など)を利用する
実行フォルダを変更しフォルダの移動、インタプリタの起動、スクリプトの実行を行うこともできる。
バージョンの確認#
インストールされた空蟬のバージョンを確認するには、以下の方法がある。バグなどの報告や、アップデートする際の目安となる。
インストーラファイル名には、数字が2種類ある。リリース番号は比較的大きなバージョンアップ(機能追加)の時に付与される。同じリリース番号でもマイナーなアップデート(バグフィックス)の場合は最終アップデート日付のみ変更される。以下のようなルールになる。
About Release number# 例
Utsusemi.X.Y.Z.yymmdd
X.Y.Z
リリース番号
yymmdd
最終アップデート日付
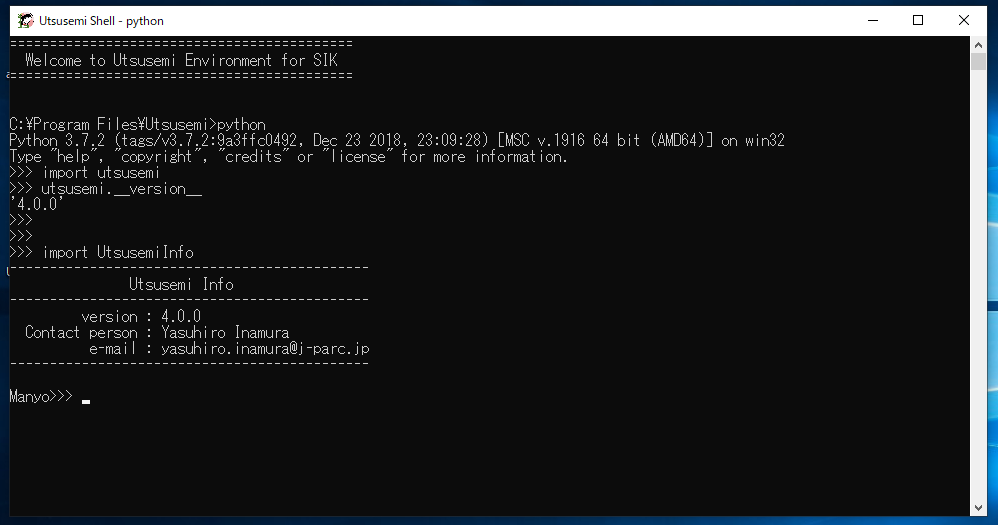
一方、 Utsusemi Shell を起動し、以下のようなコマンドを実行することでも情報を得られる。
>>> import utsusemi >>> utsusemi.__version__ '4.0.0'
もしくは、以下のようなコマンドでも可能である。
>>> import UtsusemiInfo --------------------------------------------- Utsusemi Info --------------------------------------------- version : X.Y.Z Contact person : Yasuhiro Inamura e-mail : xxxxx.yyyyy@j-parc.jp ---------------------------------------------
ファイル名と同様、X.Y.Zがリリース番号である。
アンインストール#
Windowsデフォルトのアンインストール(スタートメニュー >> コントロールパネル >> プログラム >> プログラムのアンインストール)や、空蟬パッケージインストーラを起動しアンインストールを選択する。
ただし、完全には消去されず、幾つかフォルダやファイルが残される。それらは手動で消去して良い。
C:¥¥Program Files¥Utsusemi(フォルダ)
また、幾つかの設定ファイルがフォルダに入って残されている。次回インストールした時に初期設定として呼び出されるが、消去しても良い。
C:¥¥Users¥”ユーザーネーム”¥AppData¥Roaming¥Utsusemi(フォルダ)
問題が発生した場合#
問題が発生する場合、以下の二つの場面が考えられる。
インストール直後の問題#
インストールしたのにアプリが起動しない、といったインストール直後に発生している問題の大部分は、インストールに失敗しているか、環境設定が適切になされていないか、のどちらかの原因が濃厚である。 一度アンインストールし、再度インストール、環境設定を行うこと。 それでもエラーなどが出る場合、その状況を担当者(著者)に伝えること。
過去によくあったのが、
空蟬の条件(Python 3.7.x, 64bit)に合致していないPythonがインストールされている
Pythonが2種類以上インストールされている
などである。なお、2種類インストールされていた場合、大抵どちらかが壊れている可能性が高く、正しくアンインストールできないことがある。その場合は、
アンインストールできるPythonは、アンインストールする。
壊れてアンインストールできない方は、そのバージョンをインストールしたPythonインストーラを起動し、インストールではなく「修復」を選択し、正しくインストールされた状態にする。
改めて修復したPythonをアンインストールする。
最後に正しいPythonをインストールする。
コマンド実行中もしくは可視化ソフトウェア実行中の問題#
想定とは異なる事象、例えばデータ処理が進まない、GUIのソフトウェアが想定される動作をしない(ボタンが効かない)などあった場合、環境と空蟬のバージョン、及び症状とターミナルに表示されたログを担当者(著者)に送付すること。
症状の報告について#
症状に関しては、
何をしようとして
どのコマンド(ソフトウェア)を使用して
何をしたら
どうなった
の情報を担当者(著者)に報告・送付すること。